![]()
検証日時
03/04/2015 (Wed)
概要
Gazeboのチュートリアル第六弾「Connect to ROS」。 ROSはロボットの制御フレームワークです。このチュートリアルでは、GazeboとROSのインターフェースについて説明します。 今回はその「Advanced ROS Integratio」編です。 公式サイトを適当に翻訳しただけですので、あしからず。
レベル
INTERMEDIATE
環境
| PC | : | Lenovo ThinkPad X240 |
| Prosessor | : | Intel Core i7-4600U (2.10GHz, 4MB, 1600MHz) |
| RAM | : | PC3-12800 DDR3L (8GB) |
| OS | : | Ubuntu 14.04 LTS 64bit |
| Kernel | : | 3.13.0-44-generic |
| Gazebo | : | Version 5.0.1 |
参考
GAZEBO Tutorial-Connect to ROS
チュートリアル : 発展的なROSの統合
動的再構成
物理エンジンのパラメータの一部は環境を修正するのチュートリアルで行ったように、Gazeboに合わせることが出きます。これに加えて、ROSの動的再構成メカニズムを使うことで、これらのパラメータを調整できます。
例として、シミュレーション中の重力を入れ替えてみます。以下のインストールが完了しているか確認してください。:
Groovyの場合
1
| |
Hydroの場合
1
| |
Indigoの場合
1
| |
続いて、Gazeboを起動してください。:
1
| |
物理エンジンについての変更を行う前に、Gazeboのモデルを挿入しましょう。画面左のタブよりInsertをkリックし、Pioneer 2DXのロボットモデルをクリックしてください。
完了したら、ランタイムのGazeboと情報を交換するために、ROSのGUIツールを起動してください。
1
| |
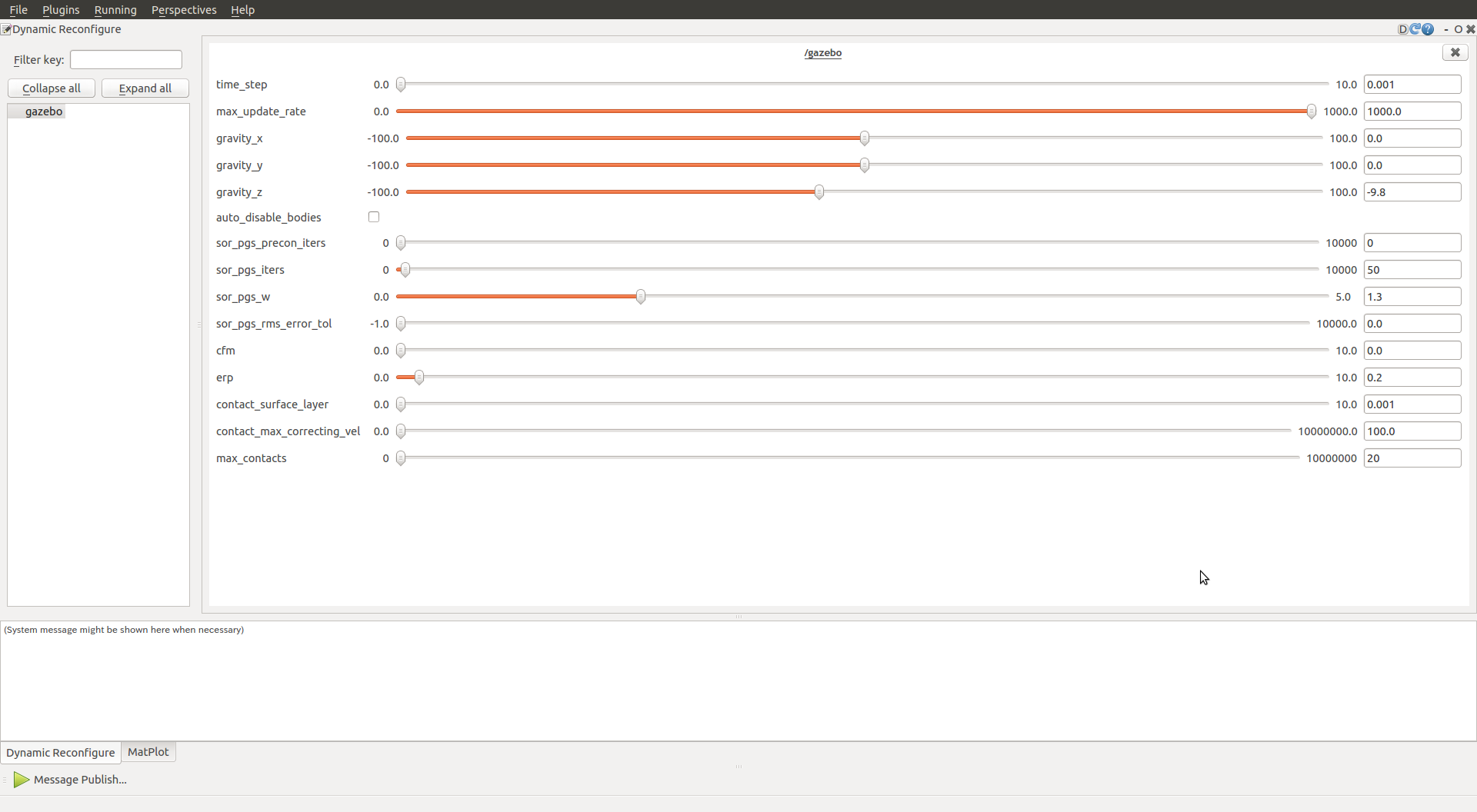
上に載せたキャプチャと一致するように、RQT(前述のROSのGUI)のパラメータを設定してください。
RQTの左側にあるgazeboをクリックすると、調整可能な物理エンジンのパラメータのリストを確認できます。
確認できたら、gravity_zを-9.8から+9.8にして、あなたのロボットに重力がどのような影響を及ぼすか、確認してみてください。
ちなみに、変更すると、Pioneer2DXがどっかに飛んでいったはずです。