No.6-8:GazeboをROSに繋ぐ (ROS Communication 編)
Mar 2 nd , 2015 9:11 pm
検証日時
03/02/2015 (Mon)
概要
Gazeboのチュートリアル第六弾「Connect to ROS」。
ROSはロボットの制御フレームワークです。このチュートリアルでは、GazeboとROSのインターフェースについて説明します。
今回はその「ROS Communication」編です。
公式サイトを適当に翻訳しただけですので、あしからず。
レベル
INTERMEDIATE
環境
PC
:
Lenovo ThinkPad X240
Prosessor
:
Intel Core i7-4600U (2.10GHz, 4MB, 1600MHz)
RAM
:
PC3-12800 DDR3L (8GB)
OS
:
Ubuntu 14.04 LTS 64bit
Kernel
:
3.13.0-44-generic
Gazebo
:
Version 5.0.1
参考
GAZEBO Tutorial-Connect to ROS
チュートリアル : ROS Communication
Gazeboはユーザにシミュレートされたworldの様々な角度を取得したり修正したりできるROSのAPIを提供しています。以下のセクションでは、シミュレーションのworldと物体を操るための効果について説明します。GazeboのためのROSメッセージとサービスの完全なリストはこのチュートリアルに書いてあります。
必要条件
これから説明する例を実行していきたいなら、RRBotのセットアップは、GazeboにおけるURDF のチュートリアルで述べているということを念頭に置いてください。このチュートリアルでは、いろいろな方法を使ってコーラの缶を蹴ります 。
1
2
roscore &
rosrun gazebo_ros gazebo
ただし、これから紹介するコマンドを打った後に、Gazeboを再起動する必要があるかもしれません。
gazeborosapi_pluginについてgazeborosパッケージと共に配置されているgazeborosapi_pluginは、gazeboと呼ばれるROSのノードを初期化します。これは、これから説明する様なROSのインターフェースを供給するために、ROSコールバックスケジュラー(message passing)とGazeboのインターナショナルスケジュラーを統合しています。このROSのAPIはユーザーがROSを超えたシミュレーション環境の詳細を扱うのと同じように、環境のモデルの姿勢の内観とスポーンを行うことを可能にします。gzserverによってのみ読み込まれます。
gazeborospaths_pluginについて2つ目のgazeborospath_pluginという名前のプラグインはGazeboがROSリソースを探す(例えば、ROSパッケージのパス名を解決する)ことを可能にするgazebo rosパッケージの中で利用可能です。gzserverとgzclientの両方によって読み込まれます。
Gazeboのpublishしたパラメータ
Parameters
名前
型
説明
/usesimtime
Bool
ROSがpublishされたROS timeのための/clockトピックを使うかどうか定義します
Gazeboは、もしシミュレーション時間が/usertimeパラメータに使用されるべきなら、他のアプリケーション(とりわけRviz)を定義するためにROSパラメータサーバーを使用します。これは、あなたがgazebo_rosを起動した時に、Gazeboが自動で設定すべきことです。gazebo_rosがROSの/clockトピックをpublishしているなら、usesimtimeはtrueです。シミュレーション時間についてはROS C++ Time をご覧ください。
値をクリックする
パラメータに何が設定されているか見るためには、以下のコマンドを実行してください。:
1
rosparam get /use_sim_time
Gazeboが購読するトピック
Topics
名前
型
説明
~/setlinkstate
gazebomsgs/LinkState
リンクの姿勢(pose/twist)を設定します。
~/setmodelstate
gazebomsgs/ModelState
モデルの姿勢(pose/twist)を設定します。
トピックを通じたシミュレーションにおけるモデルのPoseとTwist
Topics はposeの設定動作が完了するのを待つことなく、迅速にモデルのposeとtwistを設定するのに使うことができます。そのようにするために、求められるmodel state message を/gazebo/setmodelstateトピックにpublishします。例えば、topicsを通じてposeの設定をテストするために、オンラインデータベースからモデルをスポーンさせてコーラの缶をシミュレーションに追加します。:
1
rosrun gazebo_ros spawn_model -database coke_can -gazebo -model coke_can -y 1
そして/gazebo/setmodelstateトピックにpublishすることで、コーラの缶の姿勢を設定します。:
1
rostopic pub -r 20 /gazebo/set_model_state gazebo_msgs/ModelState '{model_name: coke_can, pose: { position: { x: 1, y: 0, z: 2 }, orientation: {x: 0, y: 0.491983115673, z: 0, w: 0.870604813099 } }, twist: { linear: { x: 0, y: 0, z: 0 }, angular: { x: 0, y: 0, z: 0} }, reference_frame: world }'
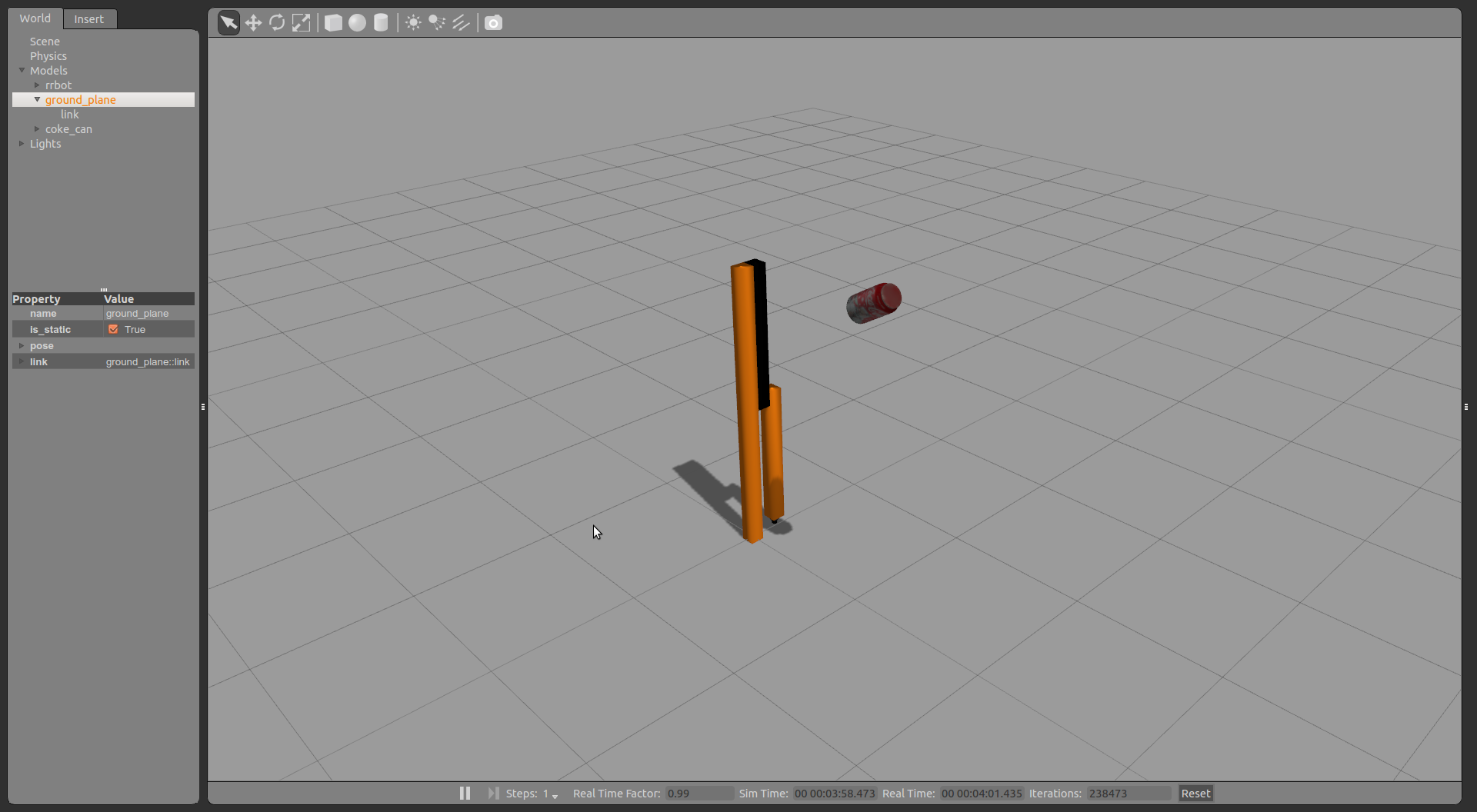
すると以下のように、蹴ってくれと言わんばかりに(まあ、今から蹴るんですが)RRBotの前にコーラの缶が浮いているのを確認できるはずです。
1
roslaunch rrbot_gazebo rrbot_world.launch
Gazeboがpuvlishするトピック
Topics
名前
型
説明
/clock
rosgraphmsgs/Clock
シミュレーション時間を/usertimeパラメータと共にpublishします。
~/linkstates
gazebomsgs/LinkStates
シミュレーション中のすべてのリンクの状態をpublishします。
~/modelstates
gazebo_msgs/ModelStates
シミュレーション中のすべてのモデルの状態をpublishします。
Topicを使ってモデルとリンクの姿勢を訂正する
Gazeboはworld座標系に関するシミュレーション中の物体のposeとtwistの情報を含む、/gazebo/linkstatesと/gazebo/modelstatesトピックをpublishしています。これらの挙動は、以下のコマンドを実行することで確認できます。
1
rostopic echo -n 1 /gazebo/model_states
もしくは
1
rostopic echo -n 1 /gazebo/link_states
繰り返すには、linkが慣性、外観、衝突プロパティの定義された剛体として定義される必要があります。一方、modelはリンクとジョイントの衝突要素として定義されます。modelの状態は標準的なlinkの状態であります。URDFが木構造で与えられており、モデルのカノニカルリンクは自身のルートリンクによって定義されます。
サービス : シミュレーション中のモデルの削除と作成
以下のサービスでは、シミュレーション中のモデルを削除したり作成したりできます。:
名前
型
説明
~/spawnurdfmodel
gazebomsgs/SpawnModel
Universal Robotic Description Format (URDF)をスポーンするために、このサービスを使います。
~/spawnsdfmodel
gazebomsgs/SpawnModel
Gazeboに記述されるSimulmulation Description Format (SDF)モデルをスポーンするために、このサービスを使います。
~/deletemodel
gazebomsgs/DeleteModel
シミュレーションからモデルを削除することができます。
モデルをスポーンする
spawnmodelと呼ばれるスクリプトはモデルのgazeborosによって呼び出されるスポーンサービスをコールするために提供されています。モデルをサービスコールを使ってスポーンするための最も実践的な方法はroslaunchファイルを使うことです。詳細は、roslaunchを使う というチュートリアルに書いてあります。URDFやSDFをGazeboに追加するためにspawn_modelを使う方法はたくさんあります。以下はそのうちのいくつかの例です。:.Xacroファイルを.xmlファイルに変換し、スポーンします。:
1
2
rosrun xacro xacro ` rospack find rrbot_description` /urdf/rrbot.xacro >> ` rospack find rrbot_description` /urdf/rrbot.xml
rosrun gazebo_ros spawn_model -file ` rospack find rrbot_description` /urdf/rrbot.xml -urdf -y 1 -model rrbot1 -robot_namespace rrbot1
roslaunchとxacroを使ったパラメータサーバーからのURDF: roslaunchを使う をご覧ください。
1
rosrun gazebo_ros spawn_model -file ` echo $GAZEBO_MODEL_PATH ` /coke_can/model.sdf -sdf -model coke_can1 -y 0.2 -x -0.3
オンラインモデルデータベースからのSDF:
1
rosrun gazebo_ros spawn_model -database coke_can -sdf -model coke_can3 -y 2.2 -x -0.3
名前空間、trimeshプロパティ、ジョイントポジション、RPYオリエンテーションを含むspawn_modelのための利用可能な引数をすべて見るには、以下を実行してください。:
1
rosrun gazebo_ros spawn_model -h
モデルを削除する
すでにGazeboの中にあるモデルの削除は、物体に与えたモデルの名前を覚えている限りは簡単です。もし、RRBotを前のセクションで記述したように、rrbot1と名付けているなら、以下のコマンドでそれを削除できます。:
1
rosservice call gazebo/delete_model '{model_name: rrbot1}'
サービス : 状態とプロパティのセッティング
以下のサービスでは、シミュレーション中の物体やシミュレーションについての状態やプロパティの情報を設定することができます。:
名前
型
説明
~/setlinkproperties
gazebomsgs/SetLinkProperties
~/setphysicsproperties
gazebomsgs/SetPhysicsProperties
~/setmodelstate
gazebomsgs/SetModelState
~/setmodelconfiguration
gazebomsgs/SetModelConfiguration
モデルのジョイントポジションをダイナミクスなしで設定できるようになります。
~/setjointproperties
gazebomsgs/SetJointProperties
~/setlinkstate
gazebomsgs/SetLinkState
~/setlinkstate
gazebomsgs/LinkState
~/setmodelstate
gazebomsgs/ModelState
モデルの姿勢を設定する例
/gazebo/setmodelstateサービスを使い、RRBotでコーラの缶を蹴ってみましょう !
1
rosrun gazebo_ros spawn_model -database coke_can -gazebo -model coke_can -y 1
これは、Gazeboもしくはオンラインモデルデータベース(インターネット接続が必要です)を通じて利用可能になるようパッケージされていなければなりません。尚、コーラの缶がどこにあっても問題はありません。
1
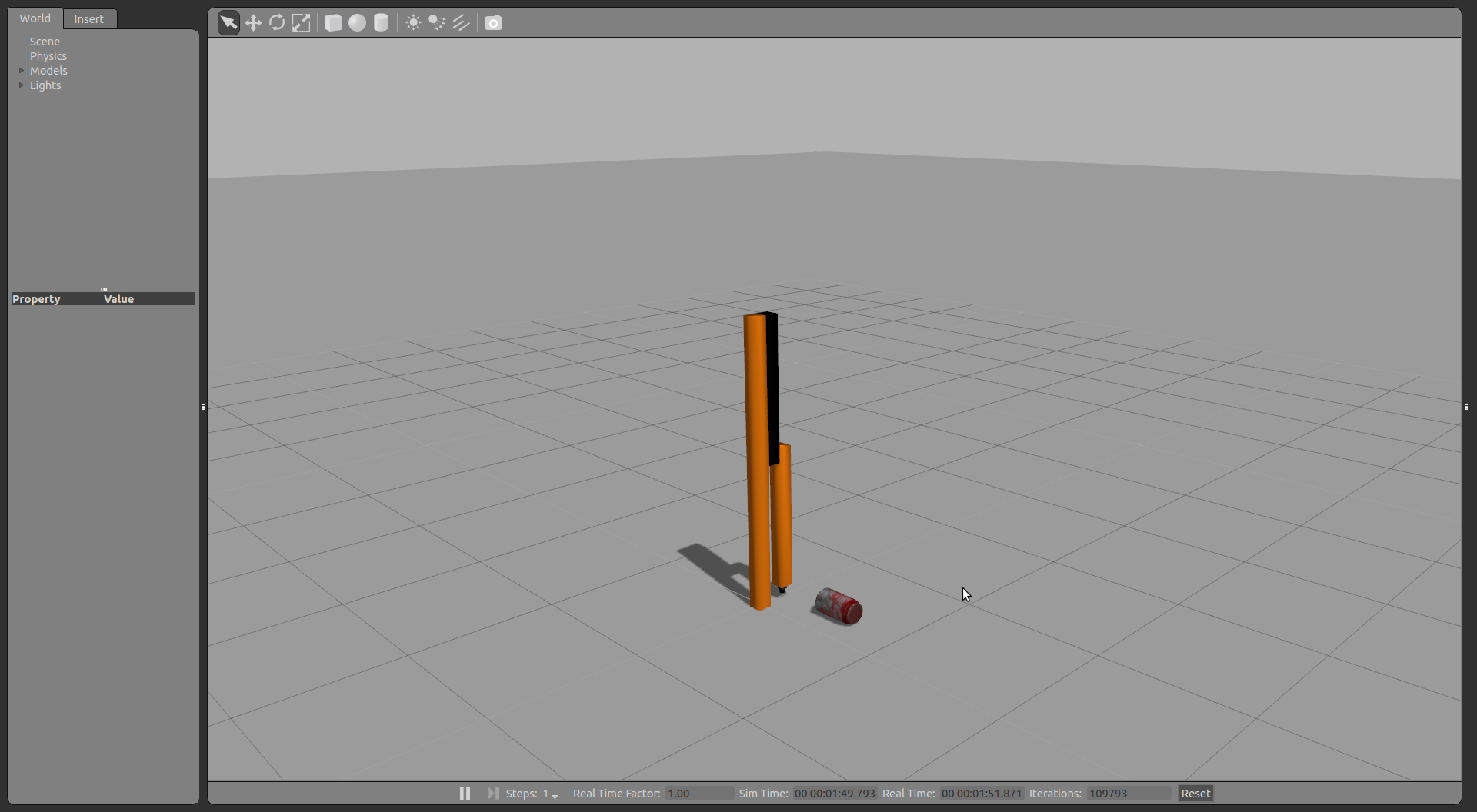
rosservice call /gazebo/set_model_state '{model_state: { model_name: coke_can, pose: { position: { x: 0.3, y: 0.2 ,z: 0 }, orientation: {x: 0, y: 0.491983115673, z: 0, w: 0.870604813099 } }, twist: { linear: {x: 0.0 , y: 0 ,z: 0 } , angular: { x: 0.0 , y: 0 , z: 0.0 } } , reference_frame: world } }'
すると、以下のようになるはずです。
続いて、RRBotを以下のコマンドを使って動かしてみましょう。
1
rosservice call /gazebo/set_model_state '{model_state: { model_name: rrbot, pose: { position: { x: 1, y: 1 ,z: 10 }, orientation: {x: 0, y: 0.491983115673, z: 0, w: 0.870604813099 } }, twist: { linear: {x: 0.0 , y: 0 ,z: 0 } , angular: { x: 0.0 , y: 0 , z: 0.0 } } , reference_frame: world } }'
うまく行けば、コーラの缶がどこかに飛んでゆくでしょう。(゜Д゜)ノ”
< div class=“youtube-container”>
VIDEO
サービス : 状態とプロパティの取得
以下のサービスでは、シミュレーション中の物体やシミュレーションについての状態やプロパティの情報を取得することができます。:
名前
型
説明
~/getmodelproperties
gazebomsgs/GetModelProperties
シミュレーション中のモデルのプロパティを返します。
~/getmodelstate
gazebomsgs/GetModelState
シミュレーション中のモデルの状態を返します。
~/getworldproperties
gazebomsgs/GetWorldProperties
シミュレーションworldのプロパティを返します。
~/getjointproperties
gazebomsgs/GetJointProperties
シミュレーション中のジョイントのプロパティを返します。
~/getlinkproperties
gazebomsgs/GetLinkProperties
シミュレーション中のリンクのプロパティを返します。
~/getlinkstate
gazebomsgs/GetLinkState
シミュレーション中のリンクの状態を返します。
~/getphysicsproperties
gazebomsgs/GetPhysicsProperties
シミュレーション中で使用される物理エンジンのプロパティを返します。
~/linkstates
gazebomsgs/LinkStates
world座標の完全なリンクの状態をpublishします。
~/modelstates
gazebo_msgs/ModelStates
world座標の完全なモデルの状態をpublishします。
注意
Gazebo中のリンクの名前はmodelname::body_nameの名前表記にスコープされます。
モデルの状態を取得する例
さて、すでにコーラの缶を蹴った ことでしょう。今度は、それがどのくらい飛んだのか知りたいですね。これまでの例を使い(同じシミュレーションを実行して)、以下のサービスコールを使ってコーラの缶のposeとtwistを取得しましょう。:
1
rosservice call gazebo/get_model_state '{model_name: coke_can}'
この結果は、ロボットの蹴った具合によって変わりますが、以下のような感じになるはずです。:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
pose:
position:
x: -33.4741996929
y: 1.72965811349
z: 0.0715116701823
orientation:
x: 0.52144600413
y: 0.478438115917
z: -0.471063379854
w: -0.526583636448
twist:
linear:
x: 5.74579911953e-07
y: 0.000217124920081
z: 9.67915822705e-06
angular:
x: -0.0029562892652
y: 7.77750570372e-06
z: 4.16767016512e-05
success: True
私のロボットは 33 [m]飛ばしました。あなたのはどうでしたか ?
シミュレーションworldとオブジェクトプロパティを取得する
以下のコマンドで、worldの中のモデルのリスト(ground_plane, coke cane, rrbot)を取得することができます。:
1
rosservice call gazebo/get_world_properties
すると、以下のような結果が得られるはずです。
1
2
3
4
5
sim_time: 59.62
model_names: [ 'ground_plane' , 'rrbot' , 'coke_can' ]
rendering_enabled: True
success: True
status_message: GetWorldProperties: got properties
また、以下のコマンドで特定のモデルの詳細を取得できます。
1
rosservice call gazebo/get_model_properties '{model_name: rrbot}'
すると、以下の様な結果が得られるはずです。
1
2
3
4
5
6
7
8
9
parent_model_name: ''
canonical_body_name: ''
body_names: [ 'link1' , 'link2' , 'link3' ]
geom_names: [ 'link1_collision' , 'link2_collision' , 'link3_collision' , 'link3_collision_camera_link' , 'link3_collision_hokuyo_link' ]
joint_names: [ 'fixed' , 'joint1' , 'joint2' ]
child_model_names: []
is_static: False
success: True
status_message: GetModelProperties: got properties
サービス : 力のコントロール
以下のサービスでは、シミュレーション中のボディやジョイントへの力とねじりを適用することができます。
名前
型
説明
~/applybodywrench
gazebomsgs/ApplyBodyWrench
シミュレーション中のボディにねじりを適用します。同じボディに適用されるすべてのアクティブなねじりは累積します。
~/applyjointeffort
gazebomsgs/ApplyJointEffort
シミュレーション中のジョイントへの力を適用します。同じジョイントに適用されるすべてのアクティブな力は累積します。
~/clearjointforces
gazebomsgs/ClearJointForces
ジョイントへ適用されている力をクリアします。
~/clearbodywrenches
gazebomsgs/ClearBodyWrenches
ボディへ適用されているねじりをクリアします。
ねじりをリンクに適用する
Gazeboのボディへのねじりの適用を説明するために、重力をなくして物体をスポーンさせてみましょう。すでにコーラの缶が追加されていることを確認してください。:
1
rosrun gazebo_ros spawn_model -database coke_can -gazebo -model coke_can -y 1
続いて、/gazebo/setphysicspropertiesサービスコールを送り、すべての軸の重力をなくしましょう。:
Then to turn off gravity send a service call to /gazebo/setphysicsproperties with no gravity in any of the axis:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
rosservice call /gazebo/set_physics_properties "
time_step: 0.001
max_update_rate: 1000.0
gravity:
x: 0.0
y: 0.0
z: 0.0
ode_config:
auto_disable_bodies: False
sor_pgs_precon_iters: 0
sor_pgs_iters: 50
sor_pgs_w: 1.3
sor_pgs_rms_error_tol: 0.0
contact_surface_layer: 0.001
contact_max_correcting_vel: 100.0
cfm: 0.0
erp: 0.2
max_contacts: 20"
/gazebo/applybodywerchサービスを呼び、コーラの缶の原点に1秒間、0.01 [Nm]のトルクを適用しましょう。すると、コーラの缶が、X軸に対して正の方向にスピンするのが確認できるはずです。:
1
rosservice call /gazebo/apply_body_wrench '{body_name: "coke_can::link" , wrench: { torque: { x: 0.01, y: 0 , z: 0 } }, start_time: 10000000000, duration: 1000000000 }'
今度は、コーラの缶の原点に1秒間、-0.01 [Nm]のトルクを適用し、缶の回転を止めましょう。:
1
rosservice call /gazebo/apply_body_wrench '{body_name: "coke_can::link" , wrench: { torque: { x: -0.01, y: 0 , z: 0 } }, start_time: 10000000000, duration: 1000000000 }'
通常、負のトルクは、曖昧な定義であることが多いです。すべてのアクティブなねじりをボディに適用するには、以下のようなコマンドを実行してください。:
1
rosservice call /gazebo/clear_body_wrenches '{body_name: "coke_can::link"}'
シミュレーション中のジョイントに力を適用する
ジョイントにトルクを適用するために、/gazebo/applyjointeffortをコールしてください。:
1
2
3
4
5
6
7
8
rosservice call /gazebo/apply_joint_effort "joint_name: 'joint2'
effort: 10.0
start_time:
secs: 0
nsecs: 0
duration:
secs: 10
nsecs: 0"
するとリンクが回り始めるはずです。
1
rosservice call /gazebo/clear_joint_forces '{joint_name: joint2}'
サービス : シミュレーションコントロール
以下のサービスでは、シミュレーション中の物理エンジンを一時停止したり解除したリアできます。:
名前
型
説明
~/pausephysics
stdsrvs/Empty
物理エンジンのアップデートを一時停止します。
~/unpausephysics
stdsrvs/Empty
物理エンジンのアップデートを再開します。
~/resetsimulation
stdsrvs/Empty
モデルのポーズをリセットします。
~/resetworld
stdsrvs/Empty
時間を含むすべてのシミュレーションをリセットします。
物理エンジンのアップデートを一時停止する
飛んでゆくコーラの缶のナイスなスクリーンショットを撮りたいとしましょう。いや、そうだと言ってください。そんな時には、以下のコマンドをコールすることで、物理エンジンを一時停止することができます。:
1
rosservice call gazebo/pause_physics
シミュレーションが一時停止するとき、シミュレーション時間が停止し、物体も静的になります。しかし、Gazeboの内部アップデートループ(カスタムのダイナミクスプラグインアップデートなど)は依然として動いており、シミュレーション時間は変わっていません。これは、シミュレーションタイムをアップデートしないことで抑制されているのです。シミュレーションを再開するために、以下のコマンドをコールして物理エンジンを再開してください。:
1
rosservice call gazebo/unpause_physics
次のステップ
Gazeboのための独自のROSプラグインの作り方について学んでください。